Developing Real-Time and Robust Aerial Tracker on a Single CPU
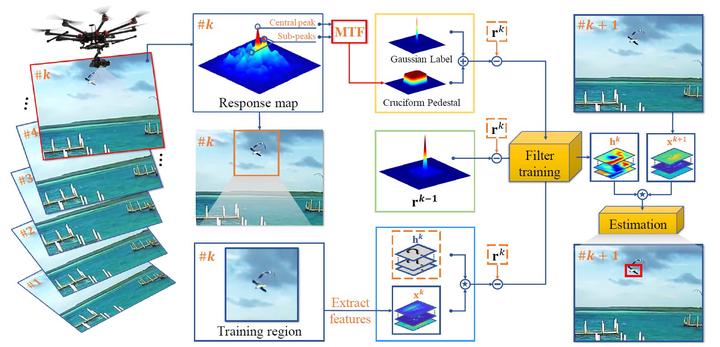
Unmanned aerial vehicle (UAV) based visual tracking has been confronted with numerous challenges, e.g., object motion and occlusion. These challenges generally introduce unexpected mutations of target appearance and result in tracking failure. However, prevalent discriminative correlation filter (DCF) based trackers are insensitive to target mutations due to a predefined label, which concentrates on merely the centre of the training region. Meanwhile, appearance mutations caused by occlusion or similar objects usually lead to the inevitable learning of wrong information. To cope with appearance mutations, this paper proposes a novel DCF-based method to enhance the sensitivity and resistance to mutations with an adaptive hybrid label, i.e., MSCF. The ideal label is optimized jointly with the correlation filter and remains temporal consistency. Besides, a novel measurement of mutations called mutation threat factor (MTF) is applied to correct the label dynamically. Considerable experiments are conducted on widely used UAV benchmarks. The results indicate that the performance of MSCF tracker surpasses other 26 state-of-the-art DCF-based and deep-based trackers. With a real-time speed of ~38 frames/s, the proposed approach is sufficient for UAV tracking commissions.
Guangze Zheng
Research assistant in Vision4Robotics
My research interests include deep learning, visual object tracking, and robotics.
