Abstract
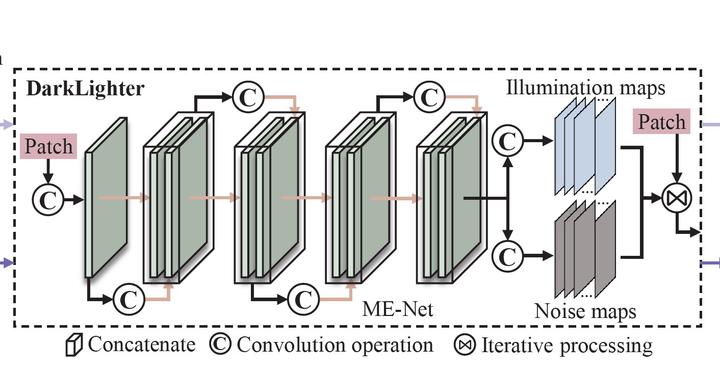
Recent years have witnessed the fast evolution and promising performance of the convolutional neural network (CNN)-based trackers, which aim at imitating biological visual systems. However, current CNN-based trackers can hardly generalize well to low-light scenes that are commonly lacked in the existing training set. In indistinguishable night scenarios frequently encountered in unmanned aerial vehicle (UAV) tracking-based applications, the robustness of the state-of-the-art (SOTA) trackers drops significantly. To facilitate aerial tracking in the dark through a general fashion, this work proposes a low-light image enhancer namely DarkLighter, which dedicates to alleviate the impact of poor illumination and noise iteratively. A lightweight map estimation network, i.e., ME-Net, is trained to efficiently estimate illumination maps and noise maps jointly. Experiments are conducted with several SOTA trackers on numerous UAV dark tracking scenes. Exhaustive evaluations demonstrate the reliability and universality of DarkLighter, with high efficiency. Moreover, DarkLighter has further been implemented on a typical UAV system. Real-world tests at night scenes have verified its practicability and dependability.
Guangze Zheng
Research assistant in Vision4Robotics
My research interests include deep learning, visual object tracking, and robotics.